倾角传感器的定义
用于测量载体相对于某个参考平面倾斜角度的传感器.
基本原理
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
随着MEMS技术的发展,惯性传感器件在过去的几年中成为较为成功,应用较广泛的微机电系统器件之一,而微加速度计(microaccelerometer)就是惯性传感器件的杰出代表。作为成熟的惯性传感器应用,现在的MEMS加速度计有非常高的集成度,即传感系统与接口线路集成在一个芯片上。
倾角传感器把MCU,MEMS加速度计,模数转换电路,通讯单元全都集成在一块非常小的电路板上面。可以直接输出角度等倾斜数据,让人们更方便的使用它。
其特点是:硅微机械传感器测量(MEMS)以水平面为参面的双轴倾角变化。输出角度以水准面为参考,基准面可被再次校准。数据方式输出,接口形式包括RS232、RS485和可定制等多种方式。抗外界电磁干扰能力强。
承受冲击振动10000G。
MEMS工艺的倾角传感器
和所有加速度计一样,传感器单元是差动电容器,其输出与加速度成比例。加速度计的性能依赖于传感器的结构设计。差动电容是由悬臂梁构成,而悬臂梁是由很多相间分布的指状电容电极副构成,一副指状电容电极可简化为图1所示的结构:
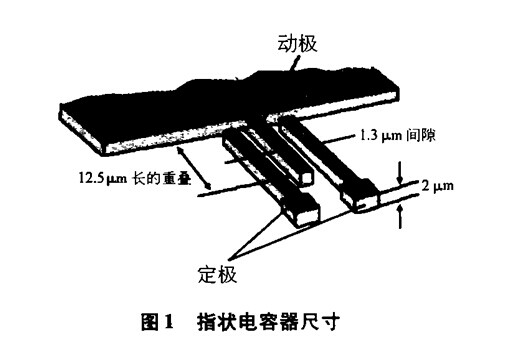
每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m的物体,因受力F而产生加速度a,则F=ma。而弹簧的形变与所受力的大小成比例,即F= kx,所以 X=(m/k)a 式中 x为位移,单位:m;m为质量,单位:kg;a为加速度,单位:m/s ;k为弹簧刚度系数,单位:N/m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以,减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂粱更坚固。所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X轴和y轴的灵敏度耦合减小到较小。
每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m的物体,因受力F而产生加速度a,则F=ma。而弹簧的形变与所受力的大小成比例,即F= kx,所以 X=(m/k)a 式中 x为位移,单位:m;m为质量,单位:kg;a为加速度,单位:m/s ;k为弹簧刚度系数,单位:N/m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以,减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。此外,增大弹簧系数使悬臂粱更坚固。所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。在ADXL202中,设计出一个新颖的悬臂梁结构。构成X轴和y轴可变电容的指状电极沿着一个正方形四周的悬臂梁集成,从而使整个传感器的面积减小,而且,共用的大质量的悬臂梁提高分辨力。位于悬臂梁四角的弹簧悬挂系统用以使X轴和y轴的灵敏度耦合减小到较小。
典型应用场合
角度测量,水平调整,零位调整倾角开关(十二路开关信号),
安全控制,监控,报警机械臂,大坝,建筑,桥梁角度测量
对准控制,弯曲控制。初始位置控制,倾角姿态记录仪汽车四轮定位
倾角传感器应用特点
可以调节输出频率,内置零位调整,可以根据要求定制零位调整按钮,从而实现在一定的角度置零的功能。这对于要测量相对倾角的场合非常有用。使用完毕后可以重新回归零位。倾角传感器在这种场合使用,只要将传感器固定在一定的平面,测量前使用零位按钮实现清零功能,传感器在此之后读出来的数据就是相对于该平面的相对倾角。
滤波功能:
当要求输出比较稳定时,建议使用比较平缓的输出,以使输出的值趋向平和,而变化不至于太剧烈。如果要求非常及时的输出,比如在测量有较高频率的振动的场合,可以使用高频输出,不过,输出会因为响应时间非常短而不稳定。同时,可以使用内部滤波功能,以实现在振动场合测量倾角的目标。
全量程倾角测量:
通过双轴的配合,可以实现360度倾角的测量。目前产品已经非常稳定。在一些需要进行全量程倾角测量的场合,选择360度产品是比较理想的。

