现在路上经常可以看到小年轻们骑着一种新型小体积的平衡电动车,或者站着,是两轮电动平衡车是一种新型的交通工具,它与电动自行车和摩托车车轮前后排列方式不同,而是采用两轮并排固定的方式。两轮电动平衡车采用两个轮子支撑,蓄电 池供电,无刷电机驱动,加上单片机控制,姿态传感器采集角速度和角度信号,共同协调控制车体的平衡,仅仅依靠人体重心的改变便可以 实现车辆的启动、加速、减速、停止等动作。

倾角传感器可以用来测量测量的倾斜的角度将信号处理便可以得到车的倾角,但是这种的倾角一般要求动态倾角,要求倾角传感在加速度的状态下,角度测量保持准确,一般可以加入陀螺仪。陀螺仪可以用来测量物体的旋转角速度。平衡车上安装陀螺仪,可以测量车倾斜的角速度,将角速度信号进行积分处理便可以得到车的倾角。但是这的制造成本会增加很多,由于这种两轮的电动车价格原因,在要求不严格的情况下可直接采用倾角传感器。
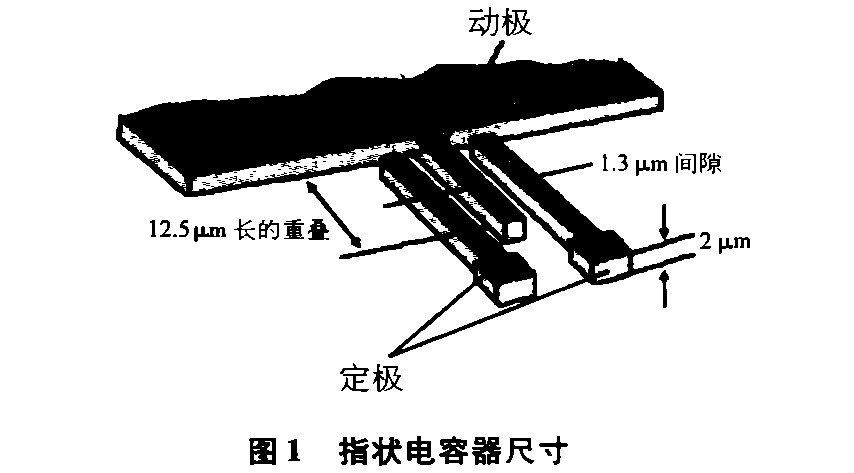
MEMS倾角传感器原理
谈到平衡我们就不得不说到陀螺仪,陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向, 制造出来的东西就叫陀螺仪。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。陀螺仪在工作时要给它一个力, 使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
陀螺仪原理
加速度和角速度两个传感器都无法单独获得动态情况下的准确,稳定的姿态,但是这两种传感器具有互补性,即加速度传感器,在静态情况下使用效果会好一些,陀螺仪在动态情况下使用,效果会好一些。此时,就需要一种算法,来将这两种信号进行有效融合,才能获取准确的姿态信息。
所以电动独轮平衡车主要通过控制器(智能芯片)、姿态传感器(陀螺仪)、倾角传感器、执行器(电机)等来实现平衡。当驾驶者倾斜身体时,姿态传感器输出相应姿态信 息,控制器感知到这个信息后,命令电机向相应方向旋转,姿态传感器按一定频率不停地测量车子姿态,并输出姿态息到控制器,控制器不停地调整电机的转动方向和转速,这样就保持了一个动态的平衡。
直川科技专业为客户解决各种倾角解决方案,拥有各行业成熟的倾角传感器解决方案,标准化的生产线,24小时技术咨询热线:18149769961



