水下机器人是一种工作于水下的遥控装置。一般由于人呢的下潜深度有限,况且水下的环境一般都很恶劣,一般由它来替代人工水下作业。
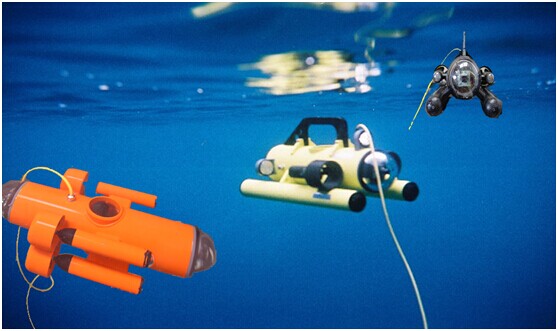
它 的优点是水下机器人可在一些特别的水域如高度危险环境、被污染环境以及零可见度,代替人工在水下长时间作业,机器上一般配备声呐系统、摄像机、照明灯和机 械臂等装置,能提供实时视频、声呐图像,机械臂能抓起重物,水下机器人在石油开发、海事执法取证、科学研究和军事等领域得到广泛应用。
潜水器的水下运动一般由在水面母舰上控制和监视。靠电缆向本体提供动力和交换信息。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经 计算机加工处理的信息,对动作过程进行监视并排除故障。开始研制智能水下机器人系统。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动 自主地完成指定任务。
水下探测器一般采用开架式结构,搭载有声纳、姿态传感器(如角度传感器等)。可以在岸上控制台通过电缆控制前进、后退、上浮、下沉等动作。除了耐压舱和浮力调节舱,还有电子仓。电子舱用来安装信标机、姿态传感器和控制电路等。浮力舱用来提供浮力,框架把整体固定在一起,保证稳定性。推进器由两个螺旋桨推进器组成,以保证在水中可以自由地做前进、倒退和转艏运动。水下探测的航行速度一般较慢,其慢速与稳定性是水底探测任务所要求的。
本文主要研究它的控制系统。控制系统分为水下和水上两部分。水上节点采用上位机,工控机安放在船上,通过光纤通信与底层的嵌入式系统实现数据通信。上位机采用Windows操作系统,其功能是监控水下机器人的运行情况并发送相应的控制命令。水下部分则采用基于微处理器的嵌入式系统,负责传感器数据采集,运动控制算法的实现和通信功能。

水下机器人上安装的传感器有:1.姿态航向传感器 主要的技术参数有航向动态精度,俯仰和横滚,尺寸,还有重量。2. 运动传感器如倾角传感器,电子罗盘,主要的参数有 俯仰和横滚动态精度,升沉精度为3测扫声纳,长基线和超短基线水声定位系统。基于短基线和深度计获取位置信息,基于姿态传感器获取航向和姿态信息。4压力传感器用于深度测量。5可以搭载成水下摄像机、照明灯等。
水下机器人中的倾角传感器选择直川科技的倾角传感器,会有不同系列和不同参数,可适用于不同使用范围的水下机器人。外观尺寸也有很多种。
ZCT245J-NAQ-ZGX为直川科技研发生产的双轴倾角传感器,测角范围±45度。本产品输出采用全双工通信方式RS-232(或TTL),具有零点设定;响应频率调整;波特率可选等功能。
ZCT230L-NNT3
水下机器人的主要工作范围有 安全搜救,检查大坝、桥墩上是否安装爆炸物以及结构好坏情况,遥控侦察、危险品靠近检查,水下基阵协助安装/拆卸,船底走私物品检测,坍塌矿井搜救,海上救助打捞、近海搜索等,由于其使用范围广泛,成为这几年科技研发发主要领域。
积小、重量轻、易于集成;
全部采用工业器件性能稳定、可靠;
抗冲击,抗震动;
输出数据用正负号表示不同的倾斜方向;
高性价比;
提供多种输出信号。
水下机器人的主要工作范围有 安全搜救,检查大坝、桥墩上是否安装爆炸物以及结构好坏情况,遥控侦察、危险品靠近检查,水下基阵协助安装/拆卸,船底走私物品检测,坍塌矿井搜救,海上救助打捞、近海搜索等,由于其使用范围广泛,成为这几年科技研发发主要领域。


